One of the key challenges in bringing highly automated vehicles to market is the complexity of validating safe driving functionality. This requires verifying that the system operates safely and reliably under all intended conditions. Research literature agrees that validation through on-road testing is no longer a viable approach.
The InVADE project shifts the validation effort from public roads to controlled laboratory environments. To achieve this, an existing powertrain test bench was enhanced for automated driving validation, and a corresponding prototype was developed.
Integrating Advanced Driver Assistance System (ADAS) sensors into a closed laboratory environment presents significant challenges, particularly in adverse conditions such as rain, glare, and fog. Through the development of specialized hardware and software prototypes, the integration of cameras, radar, and LiDAR sensors was successfully implemented.
Comprehensive testing was conducted at the DigiTrans proving ground, where rain and lighting simulations were used to systematically analyse ADAS sensor characteristics. These insights were then incorporated into the overall test bench framework.
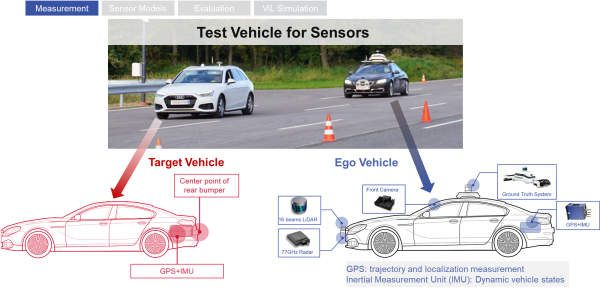 Test campaign to characterise ADAS sensor technology on the DigiTrans test track © Technische Universität Graz: Rigorosum Hexuan Li
Test campaign to characterise ADAS sensor technology on the DigiTrans test track © Technische Universität Graz: Rigorosum Hexuan Li
A key innovation of the project is the development of novel metrics, enabling a quantifiable comparison between laboratory results and real-world driving scenarios. Additionally, an automated driving function (robotaxi) was integrated into a test vehicle and validated using the test bench. The selection of relevant test scenarios proved crucial for systematic safety validation.
For normal driving conditions, a traffic flow simulation model was developed based on a section of the A2 motorway and implemented in real-time. Detailed reconstructions of real accidents were used to include conflict scenarios.
To demonstrate the practical application of the methodology, an impact analysis of the automated driving function was performed. The results showed positive effects on energy consumption, emissions, ride comfort, and safety.
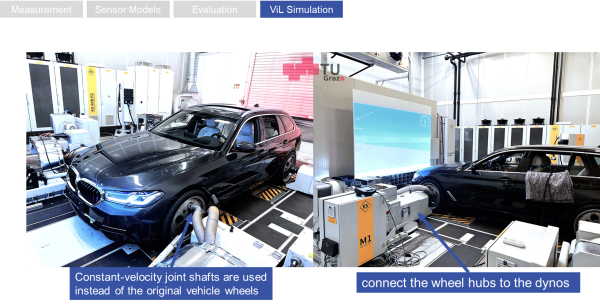 Test vehicle with integrated self-driving function and sensors(t)imulation on the vehicle-in-th-loop test bench © Technische Universität Graz: Rigorosum Hexuan Li
Test vehicle with integrated self-driving function and sensors(t)imulation on the vehicle-in-th-loop test bench © Technische Universität Graz: Rigorosum Hexuan Li
While the prototype has proven successful, future work must focus on developing standards to prove the validity of the laboratory test. Additionally, it is necessary to use standardised interfaces in order to quickly prepare a vehicle for laboratory testing.
The developed testing methodology enables Austrian companies and research institutions to position themselves as leaders in automated e-mobility and supports the safe and efficient integration of automated driving into a broader mobility ecosystem.
‘The new and globally unique test bench concept enables highly integrated validation of highly automated driving and electrified powertrains - not only in normal driving situations but also in critical and highly dynamic manoeuvres.’
 Portrait Arno Eichberger © Sissi Furgler Fotografie GmbH
Portrait Arno Eichberger © Sissi Furgler Fotografie GmbH
Arno Eichberger
Head of Department Assisted and Automated Driving (ADAS), Institute of Automotive Engineering, TU Graz
Funded by the Austrian Research Promotion Agency (FFG) as part of the funding programme ”Mobilität der Zukunft - nachhaltige Fahrzeugtechnologien.”

